Що виявив марсіанський розвідувальний супутник MRO для людства?
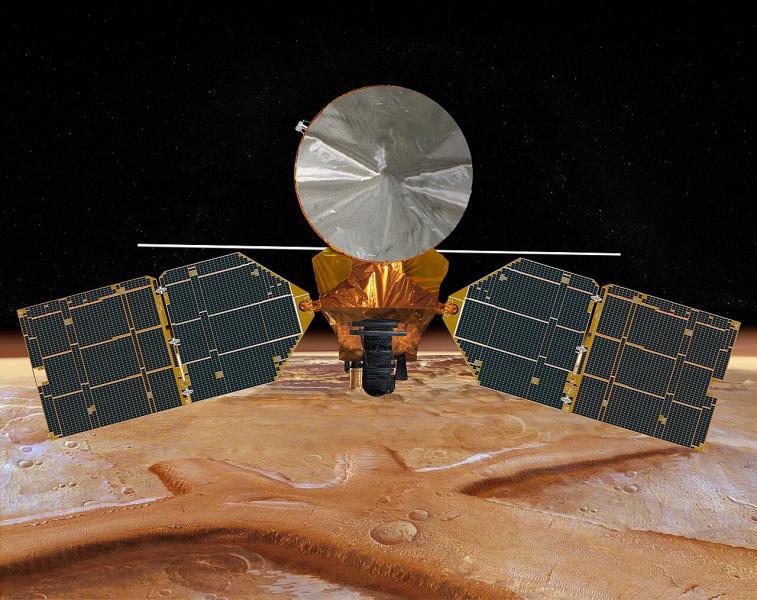
Марс Reconnaissance Orbiter (MRO) — це унікальний космічний розвідувальний апарат, який, на відміну від традиційних супутників, обертається навколо Марса. Він був запущений в космос два десятиліття тому. З того часу MRO успішно виконує безліч наукових і практичних місій, а також дарує астрономам неймовірні фотографії червоної планети.
Рівно дві декади тому, 10 березня 2006 року, до орбіти Марса вийшов космічний апарат Mars Reconnaissance Orbiter (MRO). Його головним завданням було отримання високоякісних зображень поверхні червоної планети.
MRO не був першим апаратом, призначеним для такої мети. Перші знімки Червоної планети з орбіти були отримані ще у ХХ столітті. Та й у 2006 році над Марсом вже працював Mars Odyssey. Проте жоден марсіанський супутник до того не мав настільки потужного комплексу спостережувального обладнання.
Його історія стартувала з досвіду експлуатації іншого космічного апарата — Mars Global Surveyor. Цей супутник обертався навколо Червоної планети з 1996 року і продемонстрував відмінні результати. Проте, з самого початку він не був спроектований для тривалої роботи, і до середини 2000-х років став помітно застарілим з технічної точки зору. В той час NASA потребувала надійної підтримки для місій на поверхні Марса.
Початково запуск Mars Reconnaissance Orbiter був запланований на 2003 рік, але в підсумку вирішили віддати пріоритет марсоходам Spirit і Opportunity. Проте вже було очевидно, що для марсіанського розвідника накопичилося безліч важливих завдань, тому його запуск відбувся в наступному вікні, яке відкрилося через 26 місяців. В результаті, місія стартувала 12 серпня 2005 року.
Навіть з урахуванням того, що запуск відбувся в оптимальний час, подорож до Марса тривала цілих сім місяців. І, до речі, 10 березня вона ще не була повністю завершена. Mars Reconnaissance Orbiter знаходився на високій полярній орбіті, і його потрібно було знизити для досягнення робочої орбіти. Для цього апарат виконав ряд маневрів гальмування в верхніх шарах атмосфери, кожен з яких лише незначно зменшував його апогей.
Отже, маневри MRO завершилися всього за кілька місяців, і перше зображення було надіслано у вересні 2006 року. Варто зазначити, що він встиг це зробити якраз вчасно, адже приблизно за місяць до цього було остаточно втрачено зв'язок з Mars Global Surveyor.
Але що ж зробило MRO одним із ключових засобів вивчення Червоної планети й дозволяє йому залишатися таким протягом двох десятиліть? Відповідь полягає в його унікальному обладнанні для спостереження за марсіанською поверхнею, яке включає в себе кілька камер.
Найголовнішою з них є HiRISE. По суті, це телескоп із діаметром дзеркала 0,5 м, який дивиться на поверхню Марса з висоти 300 км. Це дозволяє йому розрізняти на поверхні деталі розміром у 30 см.
Коли Mars Reconnaissance Orbiter увійшов в орбіту Марса, його точність залишалася недосяжною для більшості супутників, які спостерігають за Землею. Навіть сьогодні це досягається лише найсучаснішими військовими приладами. Додатково, камера апарату здатна фіксувати зображення не тільки в видимому спектрі, а й у ближньому інфрачервоному.
Другою камерою на борту є CTX. Роздільна здатність у неї усього 6 м на піксель, але при цьому вона здатна захоплювати смугу поверхні завширшки 30 км, а внутрішньої пам'яті достатньо для того, аби зберігати дані про смугу завдовжки 160 км. Потім їх таки треба передати на Землю. Основне її призначення -- складання високоточної карти Червоної планети.
Третя камера на борту -- Mars Color Imager (MARCI). Це ширококутний пристрій, здатний робити красиві панорамні знімки. Крім того, він може працювати у двох ультрафіолетових діапазонах. MARCI дозволяє складати прогноз погоди для Марса, а також виявляти озон та водяну пару в його атмосфері.
Також на борту є два спектрометри. Перший із них -- CRISM -- забезпечує роздільну здатність 18 м з висоти 300 км і дистанційно визначає хімічний склад поверхні на цій ділянці. Основне його призначення -- пошук мінералів на Марсі.
Другий спектрометр, відомий як Mars Climate Sounder, включає два телескопи, які функціонують в області видимого та інфрачервоного спектра. Його основна мета полягає в аналізі атмосфери Марса та визначенні її хімічного складу.
На борту місії також присутній експериментальний радіолокатор Shallow Subsurface Radar (SHARAD). Цей пристрій не лише здатний формувати зображення поверхні Марса вночі, але й має можливість досліджувати його підземні шари. Завдяки цьому SHARAD може виявляти приховані об'єкти.
Завершує наш набір інструментів для MRO комплект акселерометрів, що дозволяє здійснювати вимірювання сили гравітаційного поля планети та створювати карту його аномалій.
Отже, якби Mars Reconnaissance Orbiter обертався навколо Землі, його все ще можна було б вважати одним з найсучасніших супутників для збору розвідувальної інформації. Проте його місія залишається науковою, а не військовою.
Однією з перших практичних можливостей, які отримали вчені та інженери з моменту запуску Mars Reconnaissance Orbiter, стало спостереження за штучними об'єктами на поверхні Червоної планети з орбітальної висоти. Сьогодні на Землі це одна з найактуальніших тем, відома як геопросторові дані, які допомагають аналізувати стан сільськогосподарських угідь та промислових об'єктів. Однак можливість здійснювати такі спостереження на інших планетах, особливо 20 років тому, здавалася справжньою науковою фантастикою.
Проте однією з перших завдань, що постали перед MRO, була цілком здійсненна. У 2003 році на поверхню Марса планувалося приземлення дослідницького модуля Beagle 2. Однак, одразу після посадки він не зумів встановити зв'язок. Багато хто вважав, що апарат зазнав аварії.
Проте пізніше було з’ясовано, що зонд приземлився без проблем, але одна з його сонячних панелей відкрилася неналежно, що завадило антені функціонувати належним чином. Потім він зробив знімки марсоходів Spirit і Opportunity, а також інших апаратів, які перебували на поверхні планети.
Іншою важливою задачею, що постала перед MRO, був пошук потенційних ділянок для посадки майбутніх місій. Найзначнішою з них стала та, що в 2000-х роках отримала назву Mars Science Laboratory, а тепер відома як марсохід Curiosity. Саме зображення, отримані з марсіанського розвідника, підтвердили, що кратер Гейл вартий дослідження, а також виявили безпечні місця для посадки.
Аналогічним чином знімки й дані MRO послужили основою для вибору посадкових майданчиків зондів Phoenix та InSight, а також марсохода Perseverance. Проте у випадку з Curiosity допомогою з визначенням місця посадки усе не обмежилося. Супутник зазнімкував навіть саму платформу з марсоходом, коли вона розкрила під час посадки один зі своїх парашутів. Крім того, достатньо часто MRO виконував роль ретранслятора, передаючи дані від зондів на поверхні Марса на Землю.
Проте основні цілі MRO все ж були пов'язані з науковими дослідженнями, і вже два десятиліття цей апарат залишається одним із ключових джерел нових відкриттів про Марс. Найважливішим з них є інформація про існування води на четвертій планеті від Сонця.
На початку дослідження вчені застосували камери та спектрографи космічного апарата для вивчення порід, які були викинуті внаслідок нещодавнього падіння великого метеорита на Марс. Варто зазначити, що саме Mars Reconnaissance Orbiter (MRO) став свідком утворення найбільшого ударного кратера, зафіксованого в сучасній історії. Діаметр цього нового кратера склав 150 метрів.
Отже, досліджуючи спектри мінералів, що утворилися внаслідок зіткнень, науковці виявили наявність водяної криги. Це означає, що хоча поверхня Марса виглядає абсолютно сухою, під нею можуть приховуватися значні резерви води.
Після цього розпочалися дослідження полярних шапок. Радіолокатор SHARAD виявив, що під їхньою поверхнею можуть знаходитися великі запаси чистого льоду або, можливо, навіть рідкої води. Врешті-решт, у 2015 році камера HiRISE зафіксувала темні потоки, що з'являються на схилах кількох кратерів під час найспекотніших днів.
Науковці впевнені, що це -- не чиста вода, а перенасичені розчини деяких солей, які називаються перхлоратами. Ця рідина не може підтримувати земне життя в абсолютній більшості його проявів, але тим не менш головний факт залишається незмінним: інколи поверхнею Марса дійсно тече рідина.
При цьому раніше води на Марсі було ще більше. Саме MRO надав перші серйозні докази цього. На знімках HiRISE добре видно, що колись на планеті була розвинена система річок і протоків. А в деяких місцях камера навіть побачила елементи рель'єфу, які утворюються, коли хвилі тривалий час б'ють об берег. Також спектрометр CRISM знайшов на поверхні сліди мінералів, які могли утворитися тільки у воді.
Також Mars Reconnaissance Orbiter відкрив на поверхні Марса скло. Воно має природне походження й утворилося внаслідок метеоритних ударів. А у 2014 році апарат взагалі зміг здійснити наукове спостереження за межами Марса. Повз нього саме пролітала комета Макнота, тож він зміг зробити чимало її знімків із близької відстані.
Загалом, кількість зображень, які апарат надіслав на Землю, вже давно перевищила 100 тисяч. У цих знімках представлено безліч вражаючих сцен: дюни, що розташовані на схилах кратера Матара, незвичайні рельєфи, що нагадують павутину, пилові вихори та китайський марсохід.
Інші публікації




Популярне


У тренді