Штучний інтелект освоїв управління марсоходом Perseverance.
Олег Данилов — редактор журналу "Межа". Він уже більше 29 років займається написанням статей на теми комп'ютерів, технологій, програмного забезпечення, інтернету, космосу, науки, автоспорту та відеоігор.
Завдяки значній затримці сигналу між Землею та Марсом, яка варіюється від 3 до 22 хвилин в залежності від орбітального положення планет, неможливо здійснювати пряме управління марсоходами за допомогою джойстика. Тому до нещодавнього часу операції виконувалися в напівавтоматичному режимі: оператори аналізували рельєф місцевості та задавали навігаційні точки, за якими рухався ровер. Це пояснює повільність переміщення усіх марсіанських апаратів — приблизно 100 метрів за добу. Проте на початку грудня 2025 року NASA провела експеримент, в якому штучний інтелект отримав завдання спланувати маршрут для ровера Perseverance. Про результати цього експерименту агентство повідомило 30 січня 2026 року.
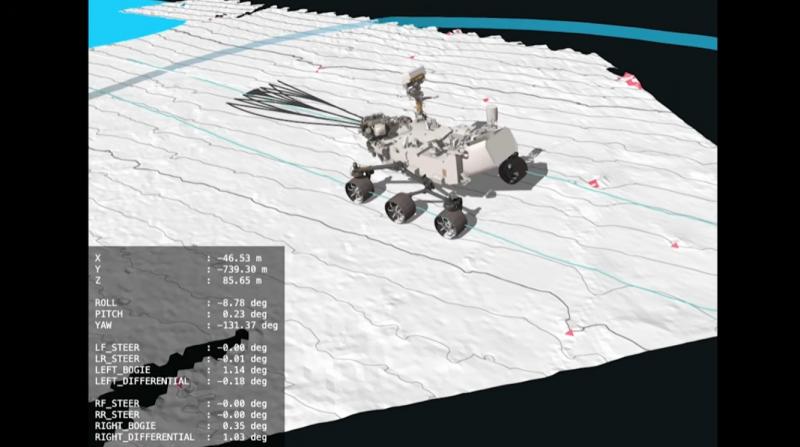
Неназвана генеративна модель штучного інтелекту провела аналіз високоякісних зображень марсіанської поверхні, отриманих камерою HiRISE, що знаходиться на борту Mars Reconnaissance Orbiter, а також цифрової моделі висот у районі, де в даний момент працює ровер Perseverance. Визначивши ключові характеристики місцевості, такі як виходи корінних порід, небезпечні зони з валунами та піщані ділянки, ШІ змогла без участі людини розробити безперервний маршрут для марсохода з вказаними точками на карті.
Спочатку фахівці Jet Propulsion Laboratory, які розробили та керують ровером, протестували алгоритми штучного інтелекту на віртуальній моделі Perseverance на нашій планеті, а потім передали отримані дані на Марс. Завантаживши маршрут з використанням ШІ, 8 та 10 грудня 2025 року ровер успішно подолав 210 та 246 метрів відповідно. Хоча це ще не абсолютний рекорд, який становить 411 метрів за добу, результат все ж вражає.
Основні компоненти генеративного штучного інтелекту показують значний потенціал для вдосконалення базових принципів автономної навігації в контексті позаземного управління. Це включає в себе сприйняття (розпізнавання кам'янистих і піщаних ділянок), локалізацію (визначення свого місця розташування), а також планування і контроль (вибір та реалізацію найбезпечнішого маршруту), - зазначає Ванді Верма, фахівець з космічної робототехніки в JPL і член команди інженерів Perseverance. - "Ми наближаємось до моменту, коли генеративний штучний інтелект і інші інтелектуальні інструменти сприятимуть нашим роверам у здійсненні тривалих подорожей, зменшуючи навантаження на операторів, і допомагатимуть виявляти цікаві елементи поверхні для нашої наукової команди, обробляючи великі обсяги зображень, отриманих роверами".
Інші публікації




Популярне


У тренді