Марсохід NASA протягом двох днів автономно досліджував поверхню Червоної планети без участі людини.
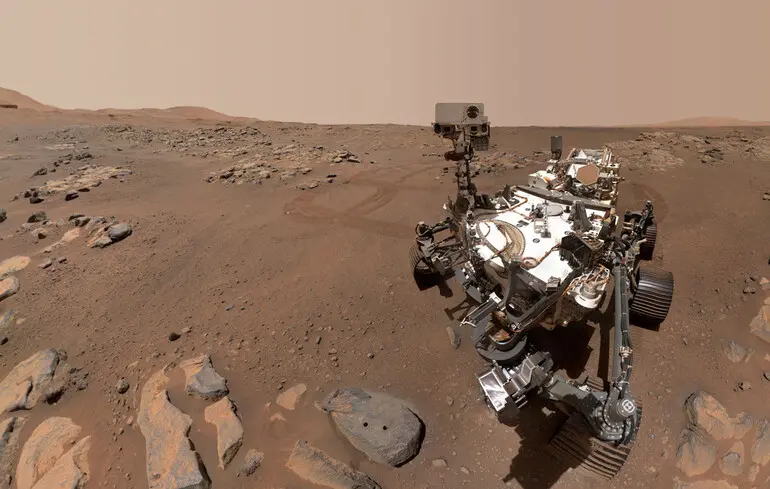
Він застосував штучний інтелект для створення маршруту.
У грудні NASA здійснило новий важливий крок на шляху до розробки автономних марсоходів. Місія Perseverance застосувала штучний інтелект для створення маршрутних точок, які використовував ровері. Впродовж двох різних днів Perseverance вдалося подолати 456 метрів без людського втручання, як повідомляє Science Alert.
"Ця демонстрація ілюструє, наскільки значно ми просунулися у наших можливостях дослідження інших світів і які нові горизонти відкриваються перед нами. Автономні технології, подібні до представленої, здатні підвищити ефективність місій, адаптуватися до складного рельєфу і збільшити науковий вихід, оскільки ми віддаляємося від Землі. Це яскравий приклад того, як команди обережно та відповідально використовують інноваційні технології в реальних умовах", -- зазначив адміністратор NASA Джаред Айзекман.
При передаванні сигналів між Землею та Марсом спостерігається затримка приблизно у 25 хвилин. Це означає, що марсоходи деякий час виконують завдання автономно.
Ця затримка має вплив на планування маршруту. На поверхні Землі оператори марсоходів вивчають зображення та інформацію про рельєф, після чого створюють послідовність контрольних точок, відстань між якими зазвичай не перевищує 100 метрів.
План руху передається через мережу далекого космічного зв'язку (DSN), яка згодом пересилає його до одного з численних орбітальних апаратів. Вони, в свою чергу, передають інформацію на марсохід Perseverance.
Під час проведення експерименту штучний інтелект досліджував орбітальні знімки, отримані камерою HiRISE з Mars Reconnaissance Orbiter, а також аналізував цифрові моделі рельєфу. На основі системи Claude AI від Anthropic, ШІ виявив потенційні небезпеки, такі як піщані пастки, кам'яні поля, корінні породи та оголення скель. Після цього він створив оптимальний маршрут, визначений через низку контрольних точок, щоб уникнути цих загроз. Управління маршрутом згодом було передане автоматизованій навігаційній системі Perseverance.
Перед тим, як передати ці навігаційні точки на Perseverance, науковці протестували їх на "двійнику" ровера в лабораторії реактивного руху NASA (JPL). Ця інженерна модель слугує команді для роботи на Землі, допомагаючи вирішувати проблеми або реагувати на подібні ситуації. Використання таких інженерних версій є звичайною практикою в місіях на Марсі, і JPL також має аналогічну модель для Curiosity.
Основні компоненти генеративного штучного інтелекту виявляють значний потенціал для підвищення ефективності ключових аспектів автономної навігації в умовах поза Землею: сприйняття (ідентифікація перешкод, таких як каміння та нерівності), локалізація (визначення нашого місця розташування) та планування й управління (прийняття рішень та вибір найбезпечнішого маршруту). Ми наближаємося до моменту, коли генеративний ШІ та інші розумні технології зможуть підтримати наші ровери у подоланні великих відстаней, одночасно зменшуючи навантаження на операторів і виявляючи цікаві особливості поверхні для нашої наукової команди, аналізуючи величезні масиви зображень, отриманих з ровера, — зазначила Ванді Верма, експерт з космічної робототехніки в JPL та член команди інженерів Perseverance.
Нагадаємо, місію з повернення зразків Марса, які зібрав Perseverance, на Землю, фактично скасували. Конгрес США різко скоротив фінансування місії, фактично скасувавши її в тому вигляді, в якому вона задумувалася.
Інші публікації


Популярне


У тренді








